

Magnetically programmable 3D printing of liquid metal robots for targeted therapy

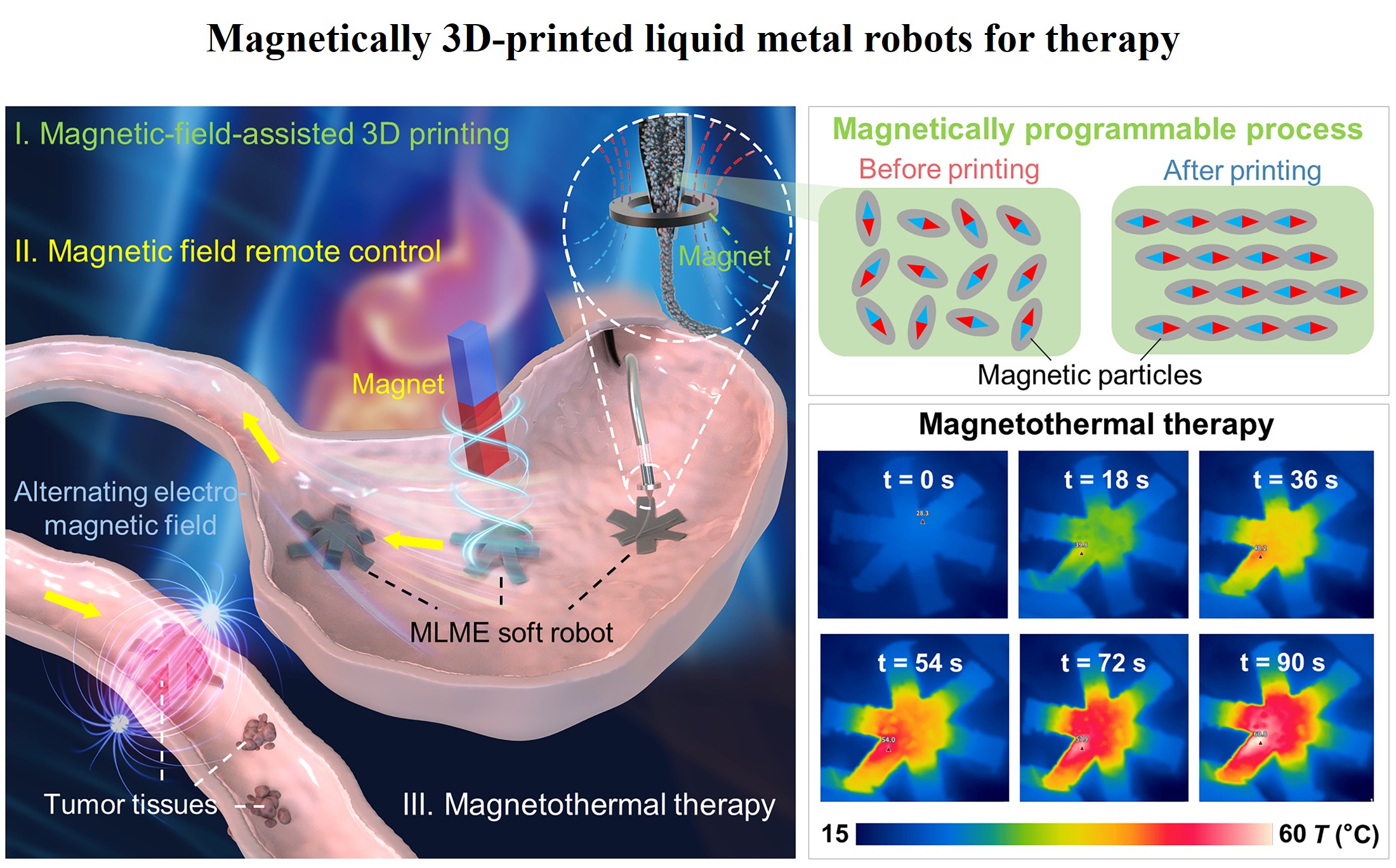
Magnetic liquid metal soft robots hold promise for minimally invasive interventions in complex in vivo environments, yet their fabrication challenges must simultaneously achieve structural customization, spatial magnetic programming, and rapid conductive network construction. Here, we present a magnetic-field-assisted 3D printing strategy to fabricate soft robots with programmable magnetic domains and magnetothermal therapeutic capabilities. Using acid-assisted de-oxidation and silver (Ag)-coated neodymium–iron–boron (NdFeB) particles to enhance wetting, we prepared magnetic liquid metals that exhibit magnetic-field-induced coalescence and achieved an order-of-magnitude increase in electrical conductivity. Furthermore, a geometry-dependent model based on eddy-current losses revealed that printed paths significantly improve heating efficiency under alternating magnetic fields. Leveraging a locally oriented magnetic field during printing, we encoded spatially resolved hard-magnetic domains, yielding predictable 3D deformation and multiple gaits, including grasping, crawling, and rolling. Finally, we demonstrated localized magnetothermal heating in ex vivo porcine colon tissues, validated by thermal measurements and finite-element simulations. This study offers a manufacturable, programmable, and scalable liquid metal additive manufacturing platform for personalized magnetically driven magnetothermal therapy in complex biological environments.
- Ciuti G, Webster RJ, Kwok KW, Menciassi A. Robotic surgery. Nat Rev Bioeng. 2025;3(7):565-578. doi: 10.1038/s44222-025-00294-6
- Dupont PE, Nelson BJ, Goldfarb M, et al. A decade retrospective of medical robotics research from 2010 to 2020. Sci Robot. 2021;6(60):eabi8017. doi: 10.1126/scirobotics.abi8017
- Wang N, Ying Y, Wang W, Liu J, Wu D, Zhao Y. Intelligent sensing and measurement technologies for medical robotics: A review. Sens Actuator A-Phys. 2025;394:116956. doi: 10.1016/j.sna.2025.116956
- Murphy RR. Is it safe to hug a robot like Baymax? Sci Robot. 2022;7(70):eade5835. doi: 10.1126/scirobotics.ade5835
- Dhawan V, Wu B, Narayanan S, Shi D, Patel Y, Cui X. A comparative study assessing neural recording quality and inflammatory tissue response between stiff and flexible microelectrode arrays. Biomaterials. 2026;329:123929. doi: 10.1016/j.biomaterials.2025.123929
- Cianchetti M, Laschi C, Menciassi A, Dario P. Biomedical applications of soft robotics. Nat Rev Mater. 2018;3(6):143- 153. doi: 10.1038/s41578-018-0022-y
- Yin S, Yao DR, Song Y, et al. Wearable and implantable soft robots. Chem Rev. 2024;124(20):11585-11636. doi: 10.1021/acs.chemrev.4c00513
- Zhou S, Li Y, Wang Q, Lyu Z. Integrated actuation and sensing: Toward intelligent soft robots. Cyborg Bionic Syst. 2024;5:0105. doi: 10.34133/cbsystems.0105
- Malappuram KM, Chatterjee K, Homer‐Vanniasinkam S, Nain A. Clinical challenges in soft robotics. Adv Robot Res. 2025;1(2):202400018. doi: 10.1002/adrr.202400018
- Wang T, Wu Y, Yildiz E, Kanyas S, Sitti M. Clinical translation of wireless soft robotic medical devices. Nat Rev Bioeng. 2024;2(6):470-485. doi: 10.1038/s44222-024-00156-7
- Chung WG, Kim E, Kwon YW, et al. Ga‐based liquid metals: Versatile and biocompatible solutions for next‐generation bioelectronics. Adv Funct Mater. 2024;34(31):307990. doi: 10.1002/adfm.202307990
- Chen S, Zhao R, Sun X, Wang H, Li L, Liu J. Toxicity and biocompatibility of liquid metals. Adv Healthc Mater. 2023;12(3):2201924. doi: 10.1002/adhm.202201924
- Wu D, Wu S, Narongdej P, et al. Fast and facile liquid metal printing via projection lithography for highly stretchable electronic circuits. Adv Mater. 2024;36(34):2307632. doi: 10.1002/adma.202307632
- Lee S, Chung WG, Jeong H, et al. Electrophysiological analysis of retinal organoid development using 3D microelectrodes of liquid metals. Adv Mater. 2024;36(35):2404428. doi: 10.1002/adma.202404428
- Guo Z, Jin D, Li H, et al. Liquid metal amplified charge separation in photocatalytic micro/nanomotors for antibacterial therapy. ACS Nano. 2025;19(21):20037-20050. doi: 10.1021/acsnano.5c03785
- Liu L, Rahim MA, Li T, et al. Composites from self‐assembled protein nanofibrils and liquid metal gallium. Adv Funct Mater. 2024;34(45):2405918. doi: 10.1002/adfm.202405918
- Cao L, Yu D, Xia Z, et al. Ferromagnetic liquid metal putty-like material with transformed shape and reconfigurable polarity. Adv Mater. 2020;32(17):2000827. doi: 10.1002/adma.202070136
- Xiang W, Lu Y, Wang H, et al. Liquid-metal-based magnetic fluids. Nat Rev Mater. 2024;9(6):433-449. doi: 10.1038/s41578-024-00679-w
- Shen Y, Cao J, Zhou E, et al. Tough hydrogel-coated containment capsule of magnetic liquid metal for remote gastrointestinal operation. Natl Sci Rev. 2025;12(4):nwaf042. doi: 10.1093/nsr/nwaf042
- Wang D, Wu Q, Guo R, Lu C, Niu M, Rao W. Magnetic liquid metal loaded nano-in-micro spheres as fully flexible theranostic agents for SMART embolization. Nanoscale. 2021;13(19):8817-8836. doi: 10.1039/D1NR01268A
- Shen Y, Jin D, Fu M, et al. Reactive wetting enabled anchoring of non-wettable iron oxide in liquid metal for miniature soft robot. Nat Commun. 2023;14(1):6276. doi: 10.1038/s41467-023-41920-4
- Shan X, Feng W, Cui Z, et al. Ubiquitous liquid metal 3D printing: From gas, liquid to rigid media. Adv Funct Mater. 2025;35(16):2421571. doi: 10.1002/adfm.202421571
- Shan X, Feng W, Guo M, Wang X, Liu J. Pan-media liquid metal 3D printing. Innovation. 2025;6(4):100813. doi: 10.1016/j.xinn.2025.100813
- Ryoo M, Kim D, Noh J, Ahn S. 3D-printed electronics for biomedical applications. Int J Bioprint. 2024;10(6):4139. doi: 10.36922/ijb.4139
- Zhao R, Wang H, Shi Y, Zhu Z, Zhang B. Low-temperature manufacturable, recyclable, and reconfigurable liquid-metal bonded NdFeB magnets for sensors and robotics. AIP Adv. 2024;14(1):015061. doi: 10.1063/5.0175503
- Chen G, Ma B, Zhang J, Chen Yi, Liu H. Reprogrammable magnetic soft robots based on low melting alloys. Adv Intell Syst. 2023;5(10):2300173. doi: 10.1002/aisy.202300173
- Kim Y, Yuk H, Zhao R, Chester S, Zhao X. Printing ferromagnetic domains for untethered fast-transforming soft materials. Nature. 2018;558(7709):274-279. doi: 10.1038/s41586-018-0185-0
- Hoang TT, Phan PT, Thai MT, et al. Magnetically engineered conductivity of soft liquid metal composites for robotic, wearable electronic, and medical applications. Adv Intell Syst. 2022;4(12):2200282. doi: 10.1002/aisy.202200282
- Lee S, Jaseem SA, Atar N, et al. Connecting the dots: Sintering of liquid metal particles for soft and stretchable conductors. Chem Rev. 2025;125(6):3551-3585. doi: 10.1021/acs.chemrev.4c00850
- Lu Y, Yu D, Dong H, et al. Dynamic leakage‐free liquid metals. Adv Funct Mater. 2023;33(11):2210961. doi: 10.1002/adfm.202210961
- Cao Y, Fan L, Gao J, et al. Magnetic and injectable Fe-doped liquid metals for controlled movement and photothermal/ electromagnetic therapy. J Mat Chem B. 2024;12(9):2313- 2323. doi: 10.1039/D3TB02501B
- Liu J, Wang Q, Xu K, Li Z, Liu J. AI-enhanced magnetically controlled 4D printing: Reshaping the future of medical robotics. Int J Bioprint. 2025;11(6):197-204. doi: 10.36922/IJB025420427