

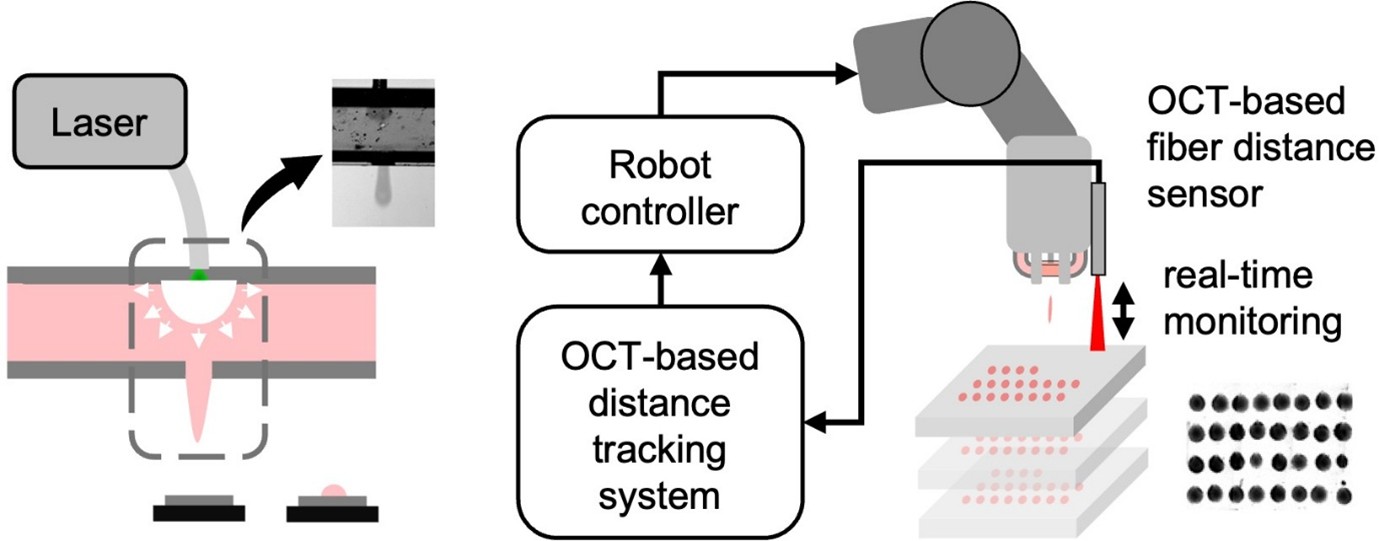
A mobile drop-on-demand laser-assisted printing head integrated with a robotic arm and a target tracking system

In this work, we present a mobile drop-on-demand (DoD) printing system based on laser-induced side transfer (LIST). By replacing the bulky free-space optics used in previous LIST configurations with a fiber-based laser delivery system, we developed a compact printing head and integrated it as an end-effector onto a robotic arm. Using model inks with viscosities up to 165 cP and time-resolved imaging, we investigated printability, printing dynamics, and the effect of printing head-to-substrate distance on key printing quality metrics. We found that printing quality deteriorates significantly beyond a 3 mm standoff distance. To address motion-induced printing quality loss on dynamic substrates, we integrated a custom-built fiber-optic distance sensor that actively maintains a constant standoff distance in real time. This enabled high-quality printing on moving targets simulating physiological motion. Additionally, we characterized the influence of ink viscosity and laser energy on droplet formation dynamics and ejected volume. Our results demonstrate the feasibility of motion-compensated, laser-assisted DoD printing in dynamic environments, with potential applications in intraoperative tissue engineering.
- Leberfinger AN, Dinda S, Wu Y, et al. Bioprinting functional tissues. Acta Biomater. 2019;95:32-49. doi: 10.1016/j.actbio.2019.01.009.
- Xu H-Q, Liu J-C, Zhang Z-Y, Xu C-X. A review on cell damage, viability, and functionality during 3D bioprinting. Mil Med Res. 2022;9(1):70-82. doi: 10.1186/s40779-022-00429-5.
- Abuwatfa WH, Pitt WG, Husseini GA. Scaffold-based 3D cell culture models in cancer research. J Biomed Sci. 2024;31(1):7-20. doi: 10.1186/s12929-024-00994-y.
- Lam EHY, Yu F, Zhu S, Wang Z. 3D bioprinting for next-generation personalized medicine. Int J Mol Sci. 2023;24(7):6357-6379. doi: 10.3390/ijms24076357.
- Pathak K, Saikia R, Das A, et al. 3D printing in biomedicine: advancing personalized care through additive manufacturing. Explor Med. 2023;4(6):1135-1167. doi: 10.37349/emed.2023.00200.
- Kim M, Kim YJ, Kim YS, et al. One-year results of ear reconstruction with 3D printed implants. Yonsei Med J. 2024;65(8):456-463. doi: 10.3349/ymj.2023.0444.
- Singh S, Choudhury D, Yu F, Mironov V, Naing MW. In situ bioprinting—bioprinting from benchside to bedside? Acta Biomater. 2020;101:14-25. doi: 10.1016/j.actbio.2019.08.045.
- MacAdam A, Chaudry E, McTiernan CD, et al. Development of in situ bioprinting: a mini review. Front Bioeng Biotechnol. 2022;10:940896. doi: 10.3389/fbioe.2022.940896.
- Li H, Cheng F, Orgill DP, Yao J, Zhang YS. Handheld bioprinting strategies for in situ wound dressing. Essays Biochem. 2021;65(3):533-543. doi: 10.1042/EBC20200098.
- Jain P, Kathuria H, Ramakrishna S, et al. In situ bioprinting: process, bioinks, and applications. ACS Appl Bio Mater. 2024;7(12):7987-8007. doi: 10.1021/acsabm.3c01303.
- Kérourédan O, Hakobyan D, Rémy M, et al. In situ prevascularization designed by laser-assisted bioprinting: effect on bone regeneration. Biofabrication. 2019;11(4):045002. doi: 10.1088/1758-5090/ab2620.
- Keriquel V, Oliveira H, Rémy M, et al. In situ printing of mesenchymal stromal cells by laser-assisted bioprinting for in vivo bone regeneration applications. Sci Rep. 2017;7(1):1778-1788. doi: 10.1038/s41598-017-01914-x.
- Pazhouhnia Z, Beheshtizadeh N, Namini MS, et al. Portable hand-held bioprinters promote in situ tissue regeneration. Bioeng Transl Med. 2022;7(3):e10307. doi: 10.1002/btm2.10307.
- Fortunato GM, Bonatti AF, Batoni E, et al. Motion compensation system for robotic based in situ bioprinting to balance patient physiological movements. Bioprinting. 2022;28:e00248. doi: 10.1016/j.bprint.2022.e00248.
- Zhao W, Hu C, Xu T. In vivo bioprinting: broadening the therapeutic horizon for tissue injuries. Bioact Mater. 2023;25:201-222. doi: 10.1016/j.bioactmat.2023.01.018.
- Samandari M, Mostafavi A, Quint J, et al. In situ bioprinting: intraoperative implementation of regenerative medicine. Trends Biotechnol. 2022;40(10):1229-1247. doi: 10.1016/j.tibtech.2022.03.009.
- Li K, Huang W, Guo H, et al. Advancements in robotic arm-based 3D bioprinting for biomedical applications. Life Med. 2023;2(6):lnad046. doi: 10.1093/lifemedi/lnad046.
- Yang Y, Cai Y, Jung Yoon Y, Zhao H, Gupta SK. Sensor-based planning and control for conformal deposition on a deformable surface using an articulated industrial robot. J Manuf Sci Eng. 2024;146(1):011005. doi: 10.1115/1.4063560.
- Li X, Liu B, Pei B, et al. Inkjet bioprinting of biomaterials. Chem Rev. 2020;120(19):10793-10833. doi: 10.1021/acs.chemrev.0c00008.
- Serra P, Piqué A. Laser-induced forward transfer: fundamentals and applications. Adv Mater Technol. 2019;4(1):1800099. doi: 10.1002/admt.201800099.
- Morales M, Munoz-Martin D, Marquez A, et al. Laser-induced forward transfer techniques and applications. Adv Laser Mater Process. 2018:339-379. doi: 10.1016/B978-0-08-101252-9.00013-3.
- Fernández-Pradas J, Colina M, Serra P, et al. Laser-induced forward transfer of biomolecules. Thin Solid Films. 2004;453(1-2):27-30. doi: 10.1016/j.tsf.2003.11.154.
- Elezoglou S, Hatziapostolou A, Giannakopoulos K, et al. High-precision depth-controlled laser bioprinting of cells in extracellular matrix for three-dimensional structures. Int J Bioprint. 2025;11(3):292-306. doi: 10.36922/IJB025100082.
- Koch L, Deiwick A, Soriano J, et al. Laser bioprinting of human iPSC-derived neural stem cells and neurons: effect on cell survival, multipotency, differentiation, and neuronal activity. Int J Bioprint. 2023;9(2):672-684. doi: 10.18063/ijb.v9i2.672.
- Delrot P, Modestino MA, Gallaire F, et al. Inkjet printing of viscous monodisperse microdroplets by laser-induced flow focusing. Phys Rev Appl. 2016;6(2):024003. doi: 10.1103/PhysRevApplied.6.024003.
- Ebrahimi Orimi H, Hosseini Kolkooh SS, Hooker E, et al. Drop-on-demand cell bioprinting via laser induced side transfer (LIST). Sci Rep. 2020;10(1):9730-9740. doi: 10.1038/s41598-020-66565-x.
- Roversi K, Ebrahimi Orimi H, Falchetti M, et al. Bioprinting of adult dorsal root ganglion (DRG) neurons using laser-induced side transfer (LIST). Micromachines. 2021;12(8):865-875. doi: 10.3390/mi12080865.
- Erfanian M, Mohammadi A, Orimi HE, et al. Drop-on-demand bioprinting: a redesigned laser-induced side transfer approach with continuous capillary perfusion. Int J Bioprint. 2024;10(3):2832-2845. doi: 10.36922/ijb.2832.
- Sheely ML. Glycerol viscosity tables. Ind Eng Chem. 1932;24(9):1060-1064. doi: 10.1021/ie50273a022.
- Pope RM, Fry ES. Absorption spectrum (380–700 nm) of pure water. II. Integrating cavity measurements. Appl Opt. 1997;36(33):8710-8723. doi: 10.1364/AO.36.008710.
- Reddy RS, Alahmari KA, Silvian PS, et al. Reliability of chest wall mobility and its correlation with lung functions in healthy nonsmokers, healthy smokers, and patients with COPD. Can Respir J. 2019;2019:5175949. doi: 10.1155/2019/5175949.
- Abid A, Duval R, Rezende F, et al. A smart vitrector equipped by a fiber-based OCT sensor mitigates intentional attempts at creating iatrogenic retinal breaks during vitrectomy in pigs. Transl Vis Sci Technol. 2021;10(13):19. doi: 10.1167/tvst.10.13.19.
- Abid A, Mittal S, Boutopoulos C. Etching-enabled extreme miniaturization of graded-index fiber-based optical coherence tomography probes. J Biomed Opt. 2020;25(3):032006. doi: 10.1117/1.JBO.25.3.032006.
- Roversi K, Orimi HE, Erfanian M, et al. LIST: a newly developed laser-assisted cell bioprinting technology. Bio Protoc. 2022;12(19):e4527. doi: 10.21769/BioProtoc.4527.
- Orimi HE, Hooker E, Narayanswamy S, et al. Spatially guided endothelial tubulogenesis by laser-induced side transfer (LIST) bioprinting of HUVECs. Bioprinting. 2022;28:e00240. doi: 10.1016/j.bprint.2022.e00240.
- Thalheim R, Willert A, Mitra D, et al. Novel and efficient methodology for drop placement accuracy testing of robot-guided inkjet printing onto 3D objects. Machines. 2023;11(5):568-579. doi: 10.3390/machines11050568.
- Antonopoulou E, Harlen O, Walkley M, et al. Jetting behavior in drop-on-demand printing: laboratory experiments and numerical simulations. Phys Rev Fluids. 2020;5(4): 043603. doi: 10.1103/PhysRevFluids.5.043603.
- Krainer S, Smit C, Hirn U. The effect of viscosity and surface tension on inkjet printed picoliter dots. RSC Adv. 2019;9(54):31708-31719. doi: 10.1039/C9RA04993B.
- Cimpeanu R, Papageorgiou DT. Three-dimensional high speed drop impact onto solid surfaces at arbitrary angles. Int J Multiph Flow. 2018;107:192-207. doi: 10.1016/j.ijmultiphaseflow.2018.06.011.
- Wijshoff H. The dynamics of the piezo inkjet printhead operation. Phys Rep. 2010;491(4-5):77-177. doi: 10.1016/j.physrep.2010.03.003.
- Zhu Z, Guo SZ, Hirdler T, et al. 3D printed functional and biological materials on moving freeform surfaces. Adv Mater. 2018;30(23):1707495. doi: 10.1002/adma.201707495.
- Zaca-Morán R, Amaxal-Cuatetl C, Zaca-Moran P, et al. Thermocavitation: a mechanism to pulse fiber lasers. Opt Express. 2021;29(15):23439-23446. doi: 10.1364/OE.430319.
- Schoppink JJ, Alvarez-Chavez JA, Fernandez Rivas D. Laser beam properties and microfluidic confinement control thermocavitation. Appl Phys Lett. 2024;124(1):011101. doi: 10.1063/5.0186998.
- Derby B. Inkjet printing of functional and structural materials: fluid property requirements, feature stability, and resolution. Annu Rev Mater Res. 2010;40(1):395-414. doi: 10.1146/annurev-matsci-070909-104502.
- Chang J, Sun X. Laser-induced forward transfer based laser bioprinting in biomedical applications. Front Bioeng Biotechnol. 2023;11:1255782. doi: 10.3389/fbioe.2023.1255782.
- Wang X, Ning Z, Lv M, et al. Machine learning for predicting the bubble-collapse strength as affected by physical conditions. Results Phys. 2021;25:104226. doi: 10.1016/j.rinp.2021.104226.
- Xu C, Zhang M, Huang Y, et al. Study of droplet formation process during drop-on-demand inkjetting of living cell-laden bioink. Langmuir. 2014;30(30):9130-9138. doi: 10.1021/la501430x.
- Tai J, Gan HY, Liang YN, et al. Control of droplet formation in inkjet printing using Ohnesorge number. Proc Electron Packag Technol Conf. 2008:761-766. doi: 10.1109/EPTC.2008.4763524.
- Qian S, Zhu DZ, Xu H. Splashing generation by water jet impinging on a horizontal plate. Exp Therm Fluid Sci. 2022;130:110518. doi: 10.1016/j.expthermflusci.2021.110518.
- Yarin AL. Drop impact dynamics: splashing, spreading, receding, bouncing. Annu Rev Fluid Mech. 2006;38:159-192. doi: 10.1146/annurev.fluid.38.050304.092144.
- van der Ven DL, Morrone D, Quetzeri-Santiago MA, et al. Microfluidic jet impact: spreading, splashing, soft substrate deformation and injection. J Colloid Interface Sci. 2023;636:549-558. doi: 10.1016/j.jcis.2023.01.024.
- Jang HJ, Yu H, Lee S, et al. Towards clinical use of a laser-induced microjet system aimed at reliable and safe drug delivery. J Biomed Opt. 2014;19(5):058001. doi: 10.1117/1.JBO.19.5.058001.
- Ishikawa I, Aoki A, Takasaki AA. Potential applications of Erbium:YAG laser in periodontics. J Periodont Res. 2004;39(4):275-285. doi: 10.1111/j.1600-0765.2004.00738.x.
- Cheptsov V, Minaev N, Zhigarkov V, et al. Laser bioprinting without donor plate. Laser Phys Lett. 2022;19(8):085602. doi: 10.1088/1612-202X/ac7b32.
- Pushkin AV, Minaev NV, Potemkin FV, et al. Bioprinting with 3-μm laser pulses. Opt Laser Technol. 2024;172:110482. doi: 10.1016/j.optlastec.2023.110482.